Autonomous Environmental Survey Vessel
Supported the development of an autonomous data collection vessel designed to map environmental conditions in Chesapeake Bay. Worked on navigation, sensing, and early AI prediction models, contributing to progress that helped secure a Coast Guard grant.
00

problem
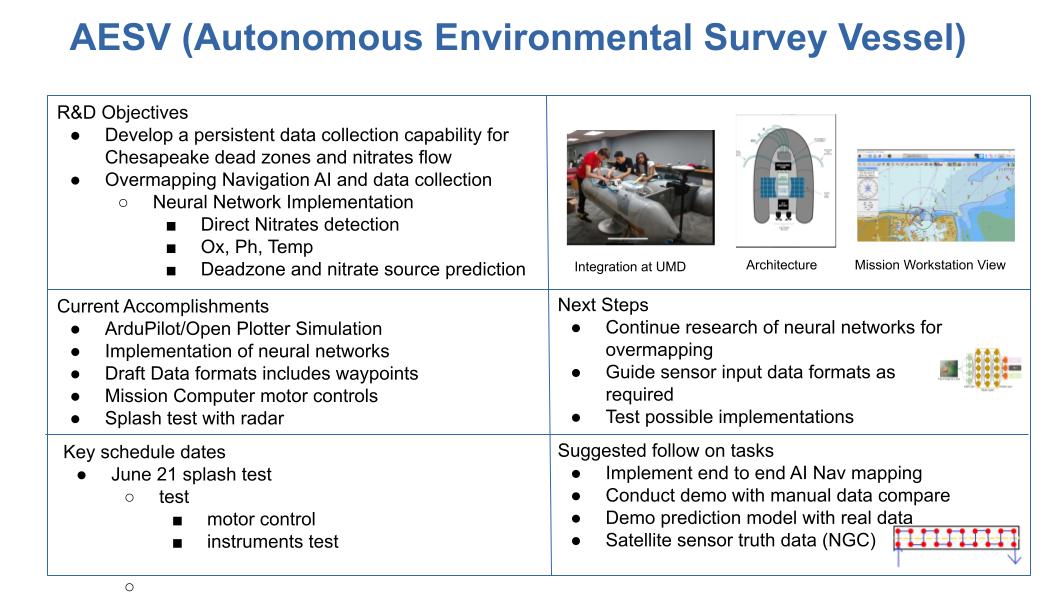
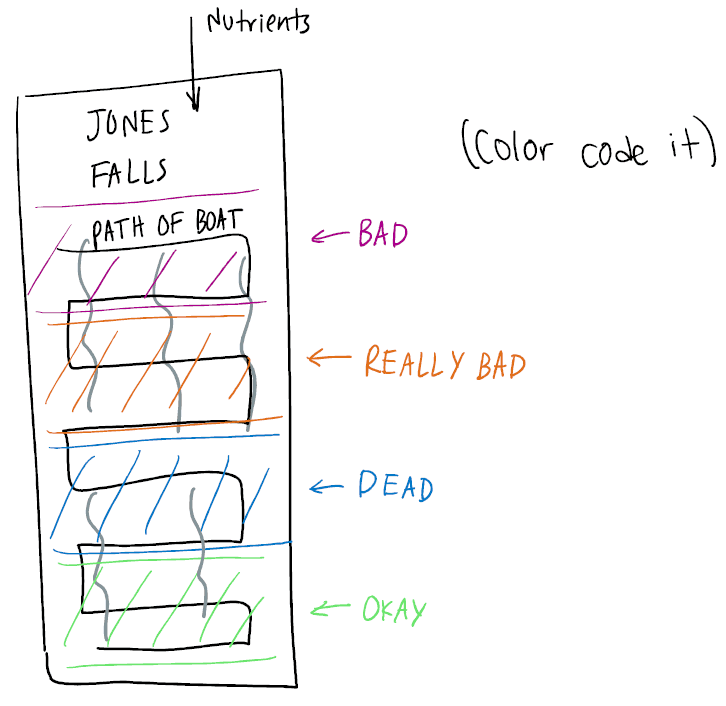
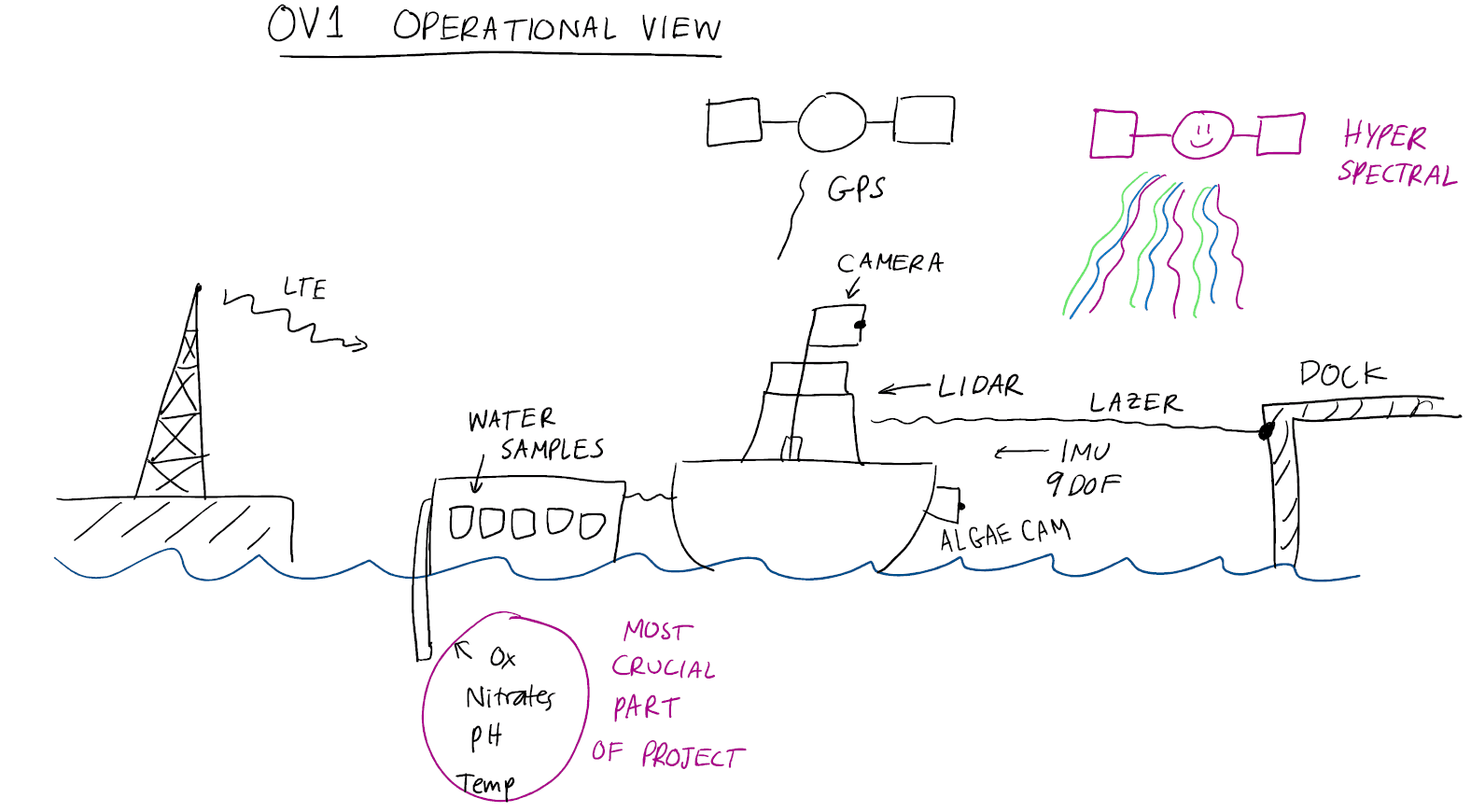
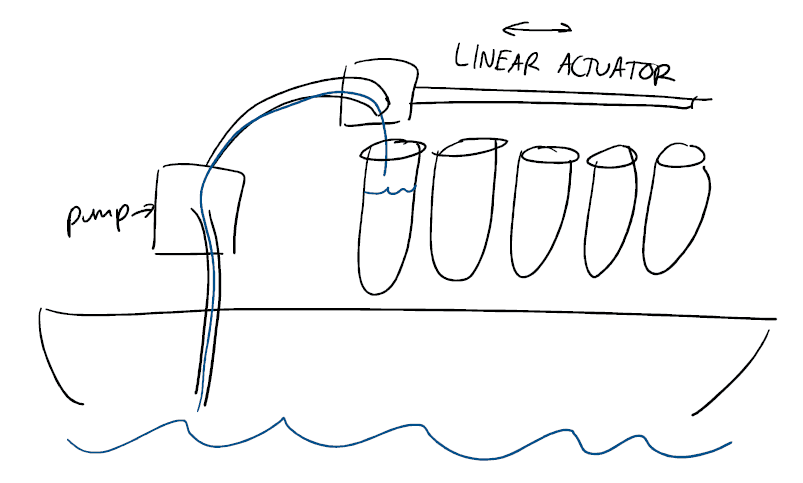
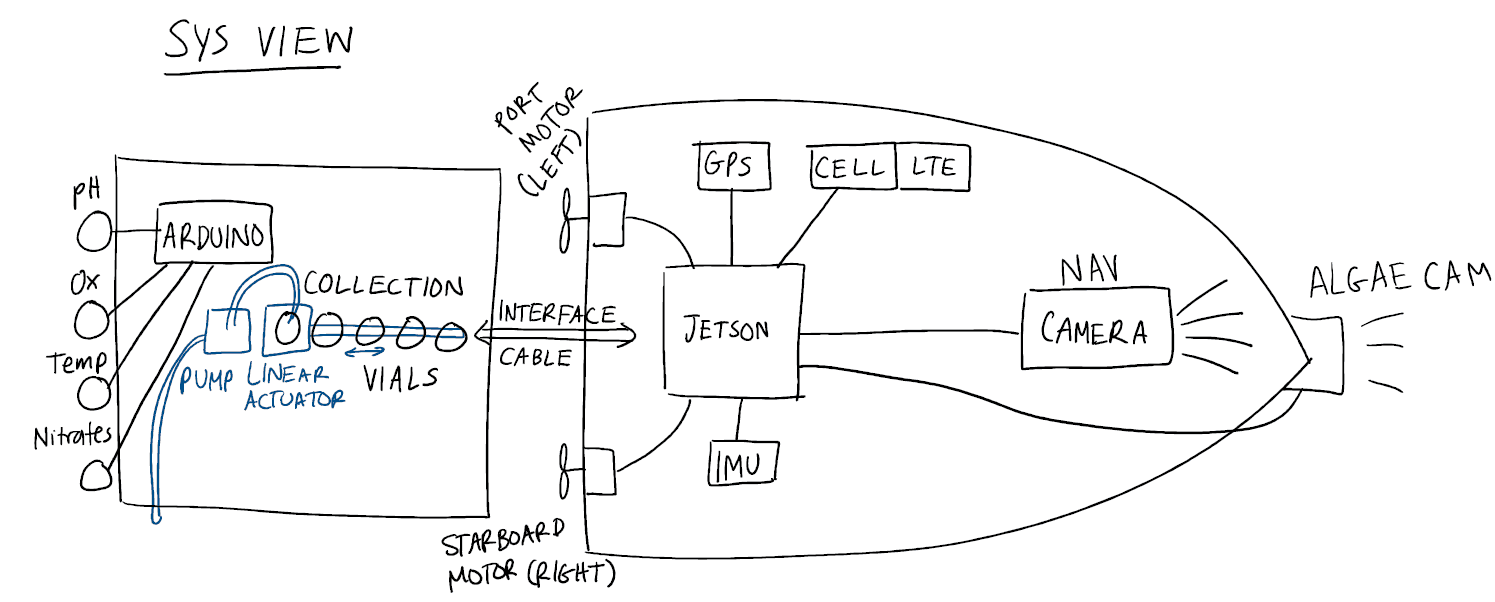
Environmental data in the Chesapeake Bay is limited by manual sampling and inconsistent coverage. The system needed to: • Operate autonomously for long periods with minimal intervention. • Collect nitrate, oxygen, pH, and temperature data at scale. • Fuse sensor data into formats suitable for predictive neural networks. • Remain stable under real world conditions, including radar visibility, currents, and weather. The challenge was to design a vessel that handled navigation, sensing, and data integrity while staying robust enough for field deployment.
solution
We built a full navigation and mission control stack using ArduPilot and OpenPlotter. We implemented neural network pipelines for nitrate detection and dead zone prediction. We drafted data formats for waypoint missions and created motor control interfaces for the onboard computer. The team completed splash tests with active radar tracking and instrument validation. The Coast Guard grant allowed us to expand our goals toward end to end AI navigation mapping, manual data comparison demos, and satellite truth data integration.
I joined the Autonomous Environmental Survey Vessel project during its early research phase, shortly after completing the autonomous RC remake of the Chesapeake Bay Mr. Trash system. That earlier project gave me experience with sensor integration, control logic, and environmental robotics, which translated directly into the AESV effort. Our goal was to build a persistent, autonomous data collection vessel for Chesapeake Bay that could map dead zones and nitrate flow.
Our team integrated sensors, mission computers, and autonomous navigation software into a platform designed for long duration data collection. The system progressed from simulation to splash testing, and the project gained enough traction to secure a research grant with the United States Coast Guard, which expanded testing and accelerated development.
01

02

03
04
05
06
see also