Budget Autonomous Air Ground System
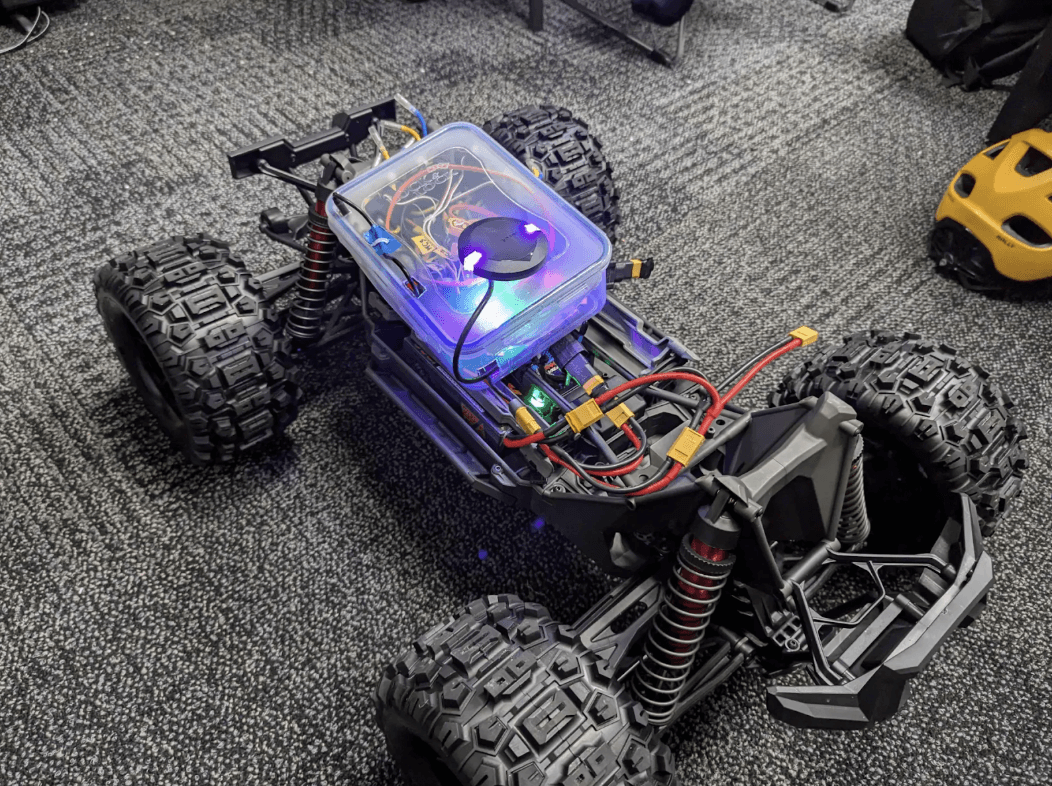
Developed a low cost drone and rover pair that share a unified ArduPilot control stack. This system demonstrates how inexpensive COTS hardware can support synchronized autonomous operations across air and ground.
00

problem
Problem Building a paired drone and rover system at low cost introduces several challenges. • Hardware must stay inexpensive without losing core navigation or sensing features. • Telemetry must remain synchronized between two independent vehicles. • Each system needs a stable mission computer and consistent control interfaces. • ArduPilot parameters must be tuned for different dynamics, one for ground and one for flight. • Both platforms need reliable communication, mission routing, and safety logic. The challenge is to maintain capability while minimizing cost and complexity.
solution
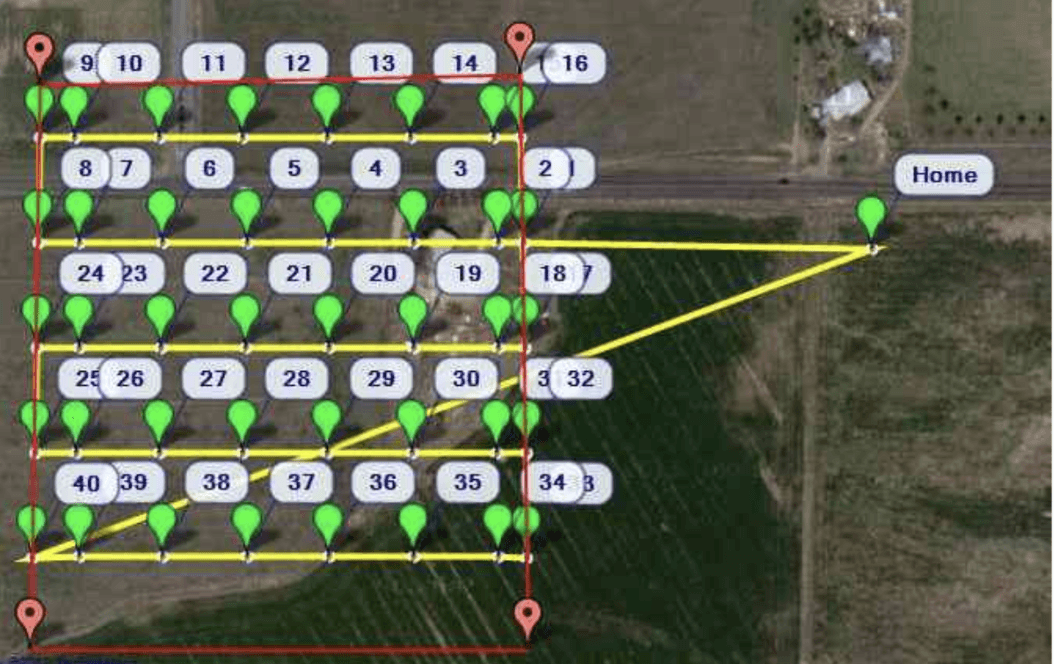
I am integrating ArduPilot across both platforms to standardize navigation, telemetry, and mission execution. I select low cost components that still support GPS, RC failsafes, and autonomous routing. I tune each vehicle for its dynamics and set up shared mission workflows so the drone and rover operate under the same command structure. I am testing air to ground coordination, telemetry sync, and routing logic to ensure both systems respond to the same mission updates. This approach keeps the platforms affordable while still scalable for larger projects.
Developing a low cost drone and rover pair that both run on ArduPilot.
My previous work with ArduPilot on the AESV and the Lab Boat showed me how much capability you can get from low cost hardware when the software stack is strong. This project extends that idea by building a synchronized air and ground system that uses inexpensive components, stays easy to scale, and supports full autonomous navigation.
01

02
03

04

05
06
07
see also