FPGA Grounded Flight Box
Currently building an FPGA based mission control box for a steerable rocket designed for counter drone research. The system handles guidance logic, telemetry, and mission states, with plans to collaborate with the UMD Rocketry Club for future testing.
00
problem
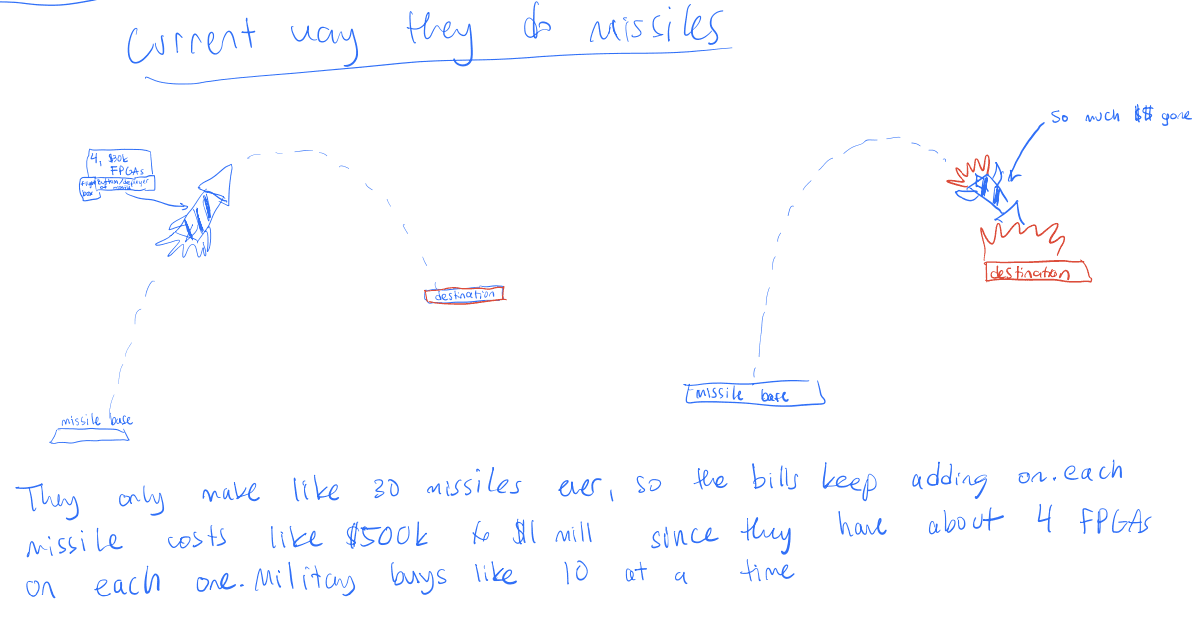
Building an anti drone rocket system introduces several constraints. • Guidance must operate with low latency, which requires hardware level control. • The ground station must process sensor data and generate commands in real time. • FPGA logic must remain stable under asynchronous inputs and changing mission states. • Telemetry links must stay reliable during ignition, flight, and high vibration events. • Safety constraints limit the complexity of field tests, which forces extensive simulation. The challenge is to build a system that delivers fast, deterministic control with minimal failure points.
solution
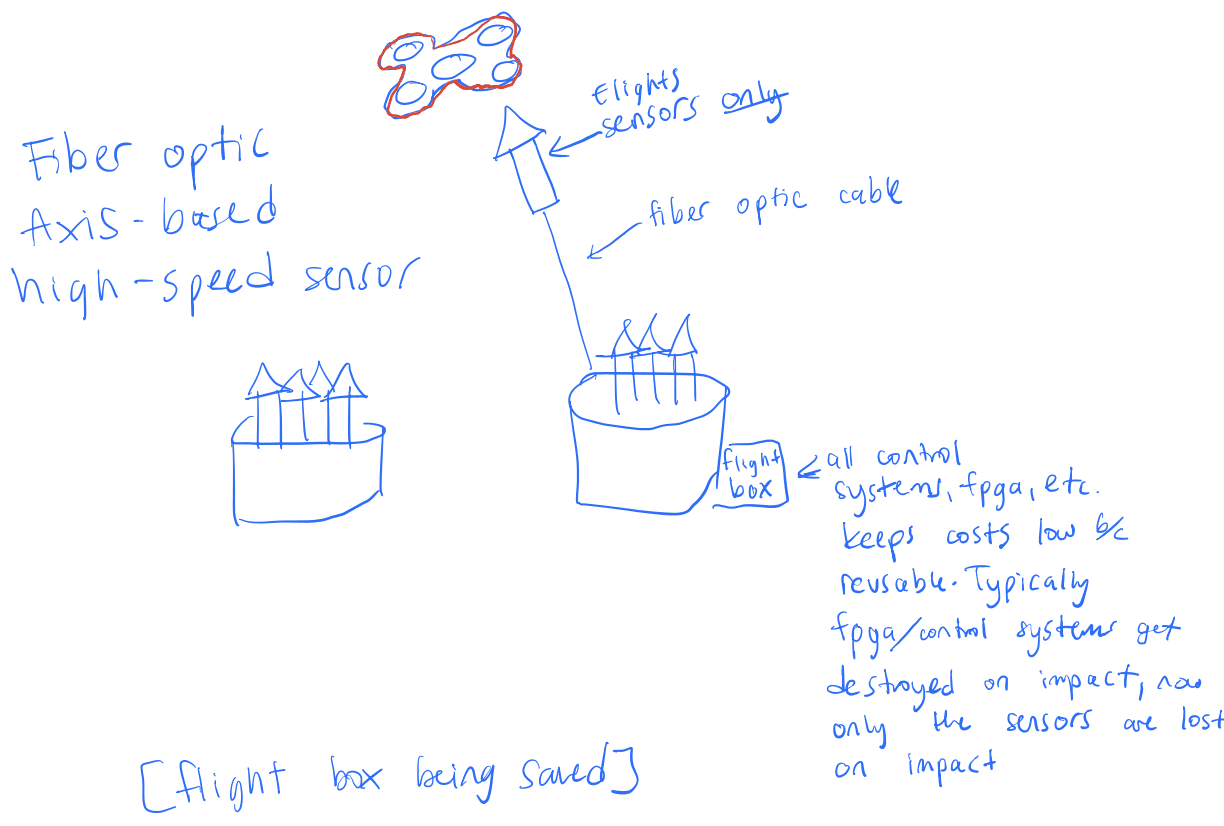
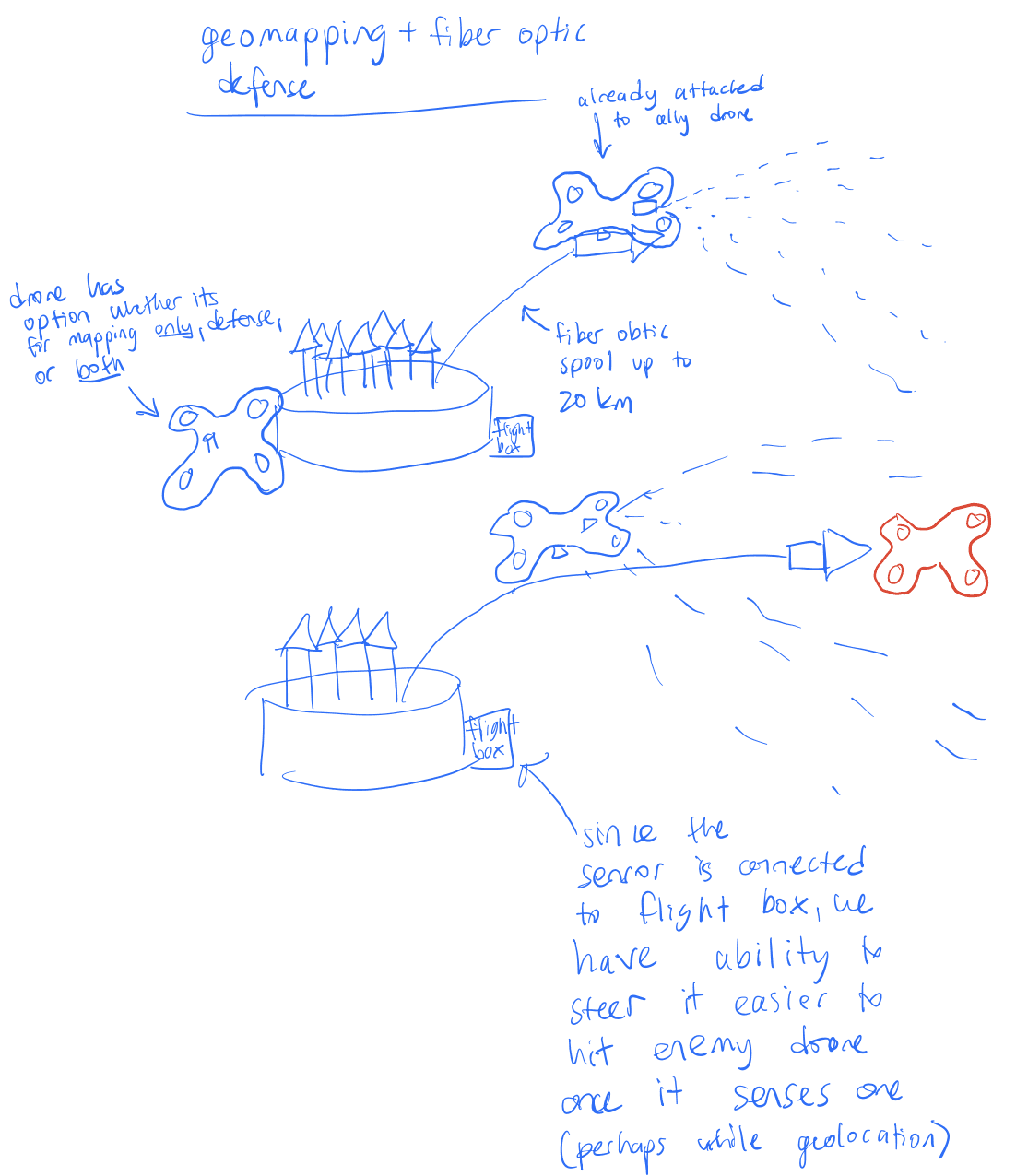
I developed FPGA modules for mission state handling, actuator control, and command decoding. I built the logic to synchronize telemetry, process targeting inputs, and maintain communication with the rocket during test sequences. I worked on the ground mission box layout, signal routing, and the software interface that allows operators to load mission profiles and monitor flight status. I integrated simulation tools to validate timing, finite state machines, and communication paths before hardware testing. The project continues to evolve as we refine the guidance routines and expand the anti drone capabilities.
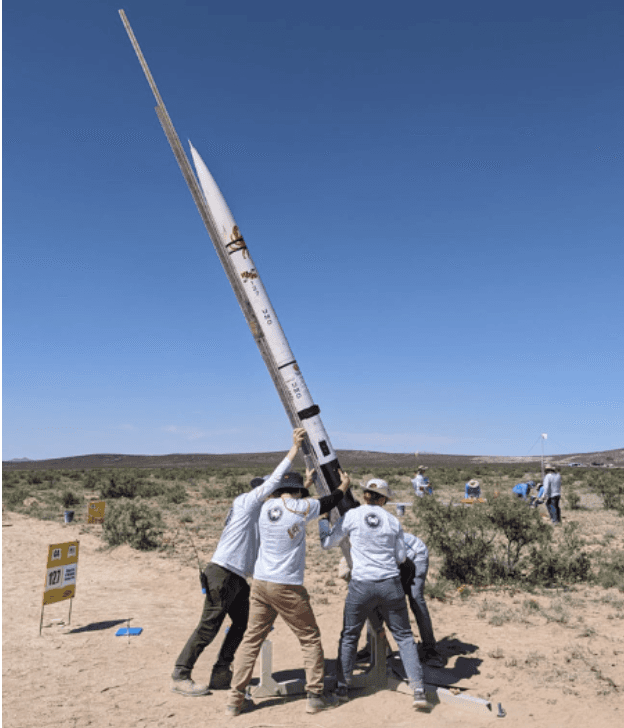
FPGA based grounded flight box as part of an ongoing steerable rocket project aimed at counter drone applications. The system uses hardware level logic to handle mission states, telemetry, and guidance with low latency. I am building the digital interfaces, communication paths, and mission workflows that link the ground node to the rocket during testing and future flight operations. I also plan to collaborate with the University of Maryland Rocketry Club to validate the guidance stack, share testing resources, and integrate the system into their future flight programs. The project remains under active development as we refine the control logic and expand the flight capabilities.
The system combines a steerable rocket platform with an FPGA controlled ground station that manages telemetry, sensor input, and guidance routines. My work focuses on the digital logic, mission control workflows, and communication links between the rocket and the ground node. The project is experimental, fast paced, and involves frequent iteration on both hardware and firmware as we refine the ability of the system to track and respond to drone targets.
01
02
03
04
05
06
07
see also